2020-12-10
Mars in Full Color: Calibration targets for the Mastcam-Z Cameras on NASA’s Mars 2020 Perseverance rover
By Kjartan Kinch, Morten Bo Madsen, Mark Hilverda, and Jim Bell
When NASA’s Perseverance rover launched from the Kennedy Space Center on top of an Atlas V rocket on 30 July 2020 it carried with it the hopes, dreams, and dedicated efforts of a large team of engineers and scientists on its seven-month journey to Mars. For every small piece of hardware on the rover there is a tale of years of design, discussion, review, construction, testing, and documentation. This is certainly the case for a pair of small color-reference targets mounted on the starboard side of the rover’s deck that are particularly meaningful to members of the Mastcam-Z team. These two radiometric calibration targets (or just “cal targets”) weigh less than 120 grams (about ¼ pound) in total and were built by Mastcam-Z co-investigators in Copenhagen, Denmark. The cal targets will help the Mastcam-Z camera system get the colors of Mars exactly right both in visible light as well as in the near-ultraviolet and near-infrared light that the cameras can detect just beyond the range of human color perception. Since the cameras will image these targets many, many times during the mission, they will become some of the most-imaged objects on Mars, and thus extra thought has been put into their visual appearance.
Perseverance
The Perseverance rover is the first leg of a planned multi-spacecraft program to achieve Mars Sample Return for the first time. The rover will land in Jezero crater, a 45 km (30 mile) wide impact crater in ancient Martian terrain on the margin of the huge Isidis impact basin. Jezero crater has two dried-out river valleys leading into it, another valley leading out of it, and a complex system of delta deposits associated with the inlet rivers on the western side of the crater. Together all of this geologic evidence makes scientists very confident that Jezero hosted a long-lived lake billions of years ago when Mars was young and more Earth-like. As the rover traverses from the relatively flat floor of Jezero crater to the delta deposits and perhaps eventually up into the crater rim and the ancient mesa terrain outside the crater, the team will collect a unique set of cored or scooped samples of ancient lake bed sediments, sediments from fluvial channels, delta and lakeshore deposits, possible younger volcanic materials, and maybe eventually samples of huge blocks of fragmented ancient impact breccia found outside Jezero crater. The rover’s set of carefully collected and sealed samples will be cached on the Martian surface for follow-up missions to eventually return to Earth, possibly by the early 2030s.
The justification for a sample return mission is partly that the rover team gets to select a specific, diverse, and information-rich set of samples that can tell us much more than the rover’s own instruments about the climate and conditions on early Mars and that might even contain physical or chemical evidence of ancient martian life – if any such life existed. Another reason for sample return is that the rover team can carefully document the geologic context in which the samples were collected, which can inform the much more detailed analysis of the samples that is possible in terrestrial laboratories, and help us link information gleaned from the samples to known characteristics of specific regions on Mars.
The Mastcam-Z Cameras
The role of the payload of science instruments on the Perseverance rover is thus to help the team characterize and understand the landscape in Jezero Crater and to allow us to select the best possible set of cached samples and carefully document their geologic context. One of the instruments in the “first line of attack” as the rover encounters unknown terrain is the Mastcam-Z camera system, a stereo, color imaging system mounted about 2 meters (6.5 feet) above the surface on the rover’s pan/tilt mast. Mastcam-Z is based on the successful Mastcam cameras on the Mars Science Laboratory mission’s Curiosity rover, but will be the first zoom-capable camera on the surface of Mars (hence the “Z”). The cameras will acquire color images in standard red-green-blue colors (covering wavelengths from about 440-670 nm, like a typical cell phone camera), but also through 11 other color filters ranging beyond the range of human vision, from a near-UV filter at 442 nm to a set of near-IR filters with the longest-wavelength band at 1022 nm. As time and downlink bandwidth allow, Mastcam-Z will be commanded to acquire sets of images in which each pixel thus contains a 14-color low-resolution near-UV to near-IR “spectrum”. This sort of enhanced color information will allow the Perseverance science team to map different bedrock layers and rock types across the landscape and to identify at a distance potential sites of particular interest for further investigation by other instruments on the payload, possibly including sampling.
Measuring Reflectance
The colors detected by the Mastcam-Z cameras when imaging the Martian surface are a result of the spectrum of the illumination source (sunlight) and the reflectance spectrum of the surface (the percentage of the illumination spectrum that makes it back to the observer). Often, researchers are primarily interested in the reflectance, which is a fundamental property of the materials being imaged. If, for instance, one wishes to compare an image of a rock to rocks imaged on a different sol (the name for a day on Mars), or to compare the colors of Mars rocks to rock samples in laboratories on Earth, one needs images that are converted – calibrated – into reflectance values. This requires correcting for changing illumination, in effect “dividing out” the illumination spectrum, which changes hour by hour and sol by sol (for example, with the position of the Sun and as the dustiness of the atmosphere changes). Since the solar spectrum is known, as well as the distance from Mars to the Sun, the illumination is well known at the top of the Martian atmosphere. However, the illumination at the surface has to be calculated (estimated) using a model for the transfer of sunlight through the dusty Martian atmosphere. Such models are cumbersome, however, and not always 100% reliable because the dustiness of the atmosphere can change rapidly but is only occasionally actually measured. For a quick and reasonably accurate estimate of illumination conditions, then, the Mastcam-Z team instead relies on imaging of a set of color and grayscale materials with well-characterized reflectances built into some special calibration targets carried with the rover to Mars. Every time the camera acquires multiple filter (“multispectral”) images of the Martian surface, the team will also try to accompany those images with images of the calibration targets through the same filters around the same time. Since the reflectances of the color and grayscale materials on the calibration targets are known, images of the cal targets can be used to determine the illumination. This information, in turn, can be used to convert the images of Mars scenes to reflectance by “dividing out” the illumination. The same basic principle is used all the time by professional photographers on Earth and has been used with various kinds of cal targets on all previous Mars rover and lander missions.
Mastcam-Z Calibration Targets
The Perseverance rover carries two cal targets for Mastcam-Z, called the primary and secondary targets. The primary target (Figure 1a) is the larger of the two, with a more intricate design, and the one that will see the most direct, extensive use in the conversion of Mastcam-Z images to reflectance. The secondary target (Figure 1b) is simpler and is intended as a cross-check for the primary target, in a somewhat different illumination and dust-deposition environment.
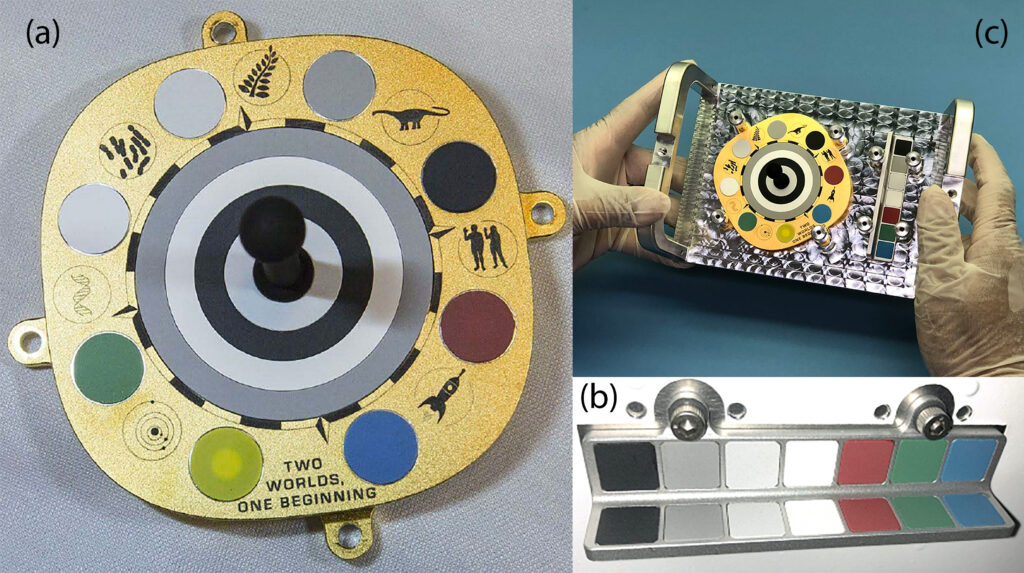
Figure 1. (a) The Mastcam-Z primary radiometric calibration target. The base of the target is ~9.8 x 9.8 cm (3.9 x 3.9 in); (b) The Mastcam-Z secondary radiometric calibration target. The length of the target is ~8 cm (3.1 in) and the “shelf” is ~1.6 cm (0.6 in) wide; (c) Inspection photo. Photo credits: (a) Niels Bohr Institute, Copenhagen, Denmark; (b, c) NASA/JPL-Caltech/ASU.
The primary target consists of a base structure in ball-blasted aluminum with a silver and gold plating. The gold plating is engraved with a number of artistic and inspirational embellishments deemed “festooning” by NASA and described in detail below. Eight strong hollow-cylinder permanent magnets are mounted in depressions along the periphery of the base, and eight ceramic color and grayscale patches are bonded on top of those. The field from the eight magnets will keep a small area in the center of each patch relatively free of the omnipresent, iron oxide-bearing, Martian atmospheric dust, thus retaining their colors and grayscales in close to pristine condition, as characterized before flight. Four ceramic grayscale rings using the same materials as were used for the grayscales in four of the eight patches are bonded into a broad depression in the center of the base. The very center of the base carries an aluminum shadow post or gnomon, painted with an IR-black paint.
Figure 2 shows the two targets mounted on the starboard side of the rover deck and imaged using the Mastcam-Z cameras during pre-flight calibration activities at the Jet Propulsion Laboratory in Pasadena in October of 2019.
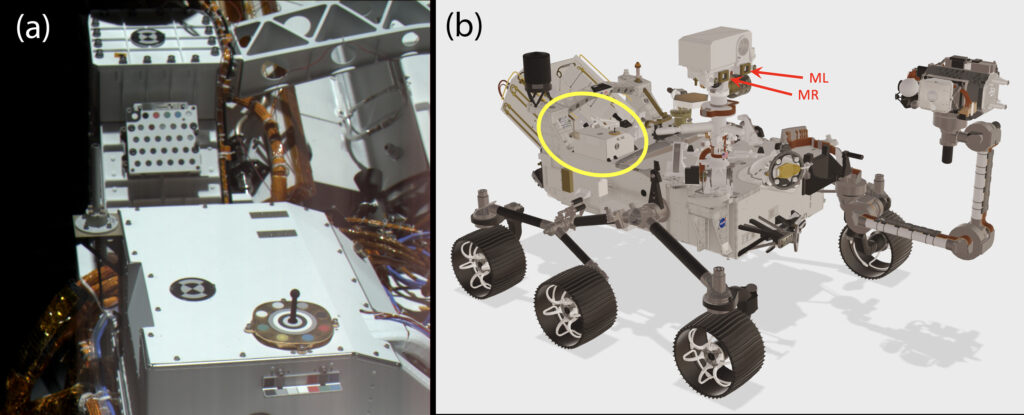
Figure 2: (a) The Mastcam-Z calibration targets mounted on the rover and imaged with the left Mastcam-Z camera during testing at JPL. The primary target is the golden structure with the bulls-eye pattern bottom right. The secondary target is the bracket immediately below it. (b) The location of the image field of view in (a) is indicated by the yellow oval on this CAD model of the Perseverance rover (online at https://mars.nasa.gov/resources/25042/mars-perseverance-rover-3d-model). The locations on the rover’s mast of the Mastcam-Z left (ML) and right (MR) cameras are also indicated. Photo credits: NASA/JPL-Caltech/ASU.
An assembly drawing of the primary target is shown in Figure 3. The secondary calibration target is a small (15 g), fairly simple bracket in un-plated, ball-blasted aluminum holding a total of 14 bonded ceramic color and grayscale patches. Four distinct grayscales and three distinct colors are each repeated twice, once on a vertical surface and once on a horizontal surface. The colors and grayscales are identical to colors and grayscales on the primary target, except the yellow is missing. An assembly drawing of the secondary target is also shown in Figure 3.
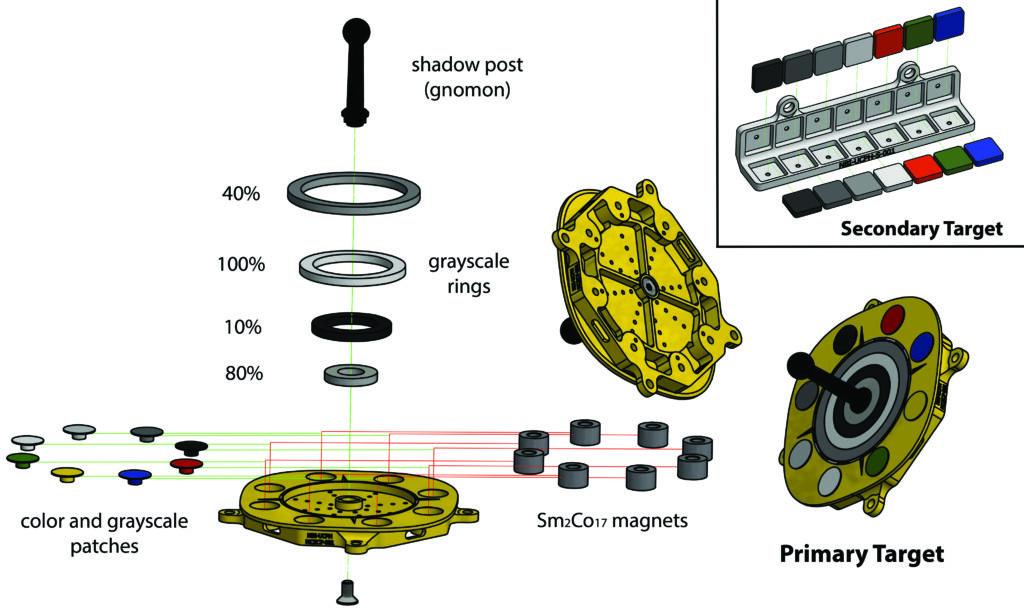
Figure 3: Assembly drawings showing the components of the Mastcam-Z primary and secondary radiometric calibration targets. The shadow post or gnomon is made of aluminum and painted with an ultralow reflectance black paint. The grayscale rings are made of sintered alumina or glazed and matted aluminum-silicates, and they have the average visible-wavelength reflectances shown here. The color and grayscale patches are also made from the same materials, and are called (going clockwise): Red, Blue, Yellow, Green, White, Light Grey, Dark Grey, and Black. The eight Sm2Co17 magnets are each 11 mm diameter and 7 mm tall and are bonded 0.4 mm beneath each color patch. The base plate of the target is made of aluminum, coated with thin layers of silver then gold plating. The inset at upper right shows the components of the Mastcam-Z secondary calibration target. The color and grayscale patches are identical to those in the primary target, except the yellow is missing. Each patch repeats twice, once on the vertical face and once on the horizontal face. The base bracket of the target is made of aluminum. Photo credit: Niels Bohr Institute, Copenhagen, Denmark/NASA/JPL-Caltech/ASU.
Based on experience from the broadly similar Curiosity rover, the location of the secondary calibration target (on the vertical surface of the “Rover Pyro Firing Assembly” cover on the rover deck) is expected to accumulate significantly less dust both during the energetic landing process when dust and sand are kicked up by the “skycrane” retrorockets, as well as during later surface operations when dust gradually accumulates from atmospheric fallout. This is doubly true for the vertically-mounted patches on the target. While most likely overall cleaner of dust, the secondary target location would not be suitable for placement of the primary target, as it would be in shadow roughly half the time. When the location is sunlit, though, secondary target images can be used to crosscheck and validate software tools used to correct for the presence of dust on the primary target.
Embellishments
The Mastcam-Z primary calibration target contains a number of “embellishments” (officially known as and approved by NASA as “festooning”) developed by the Mastcam-Z team in collaboration with The Planetary Society, the team’s Education and Public Outreach (EPO) partner organization (see “Calibrating Mars” in the December 2020 issue of The Planetary Report, pages 19-22). These are elements that do not have a direct engineering or scientific purpose but that have been added to the target for artistic purposes, to help communicate the Mars 2020 mission’s goals and historical context to the public, and to enable EPO activities associated with the target to be developed for teachers, students, and the public. The embellishments are laser-engraved into the surface of the calibration target and consist of a motto, a set of graphics, and an inspirational message. The motto and graphics are engraved on the top surface of the calibration target and will be visible to Mastcam-Z and some of the other cameras on the rover. The inspirational message is engraved in smaller font around the edge and is mostly hidden from view of the Mastcam-Z or other cameras on the rover, as it is intended to ultimately be read instead by future astronauts or others who encounter the rover in the future.
The Motto
Inscribing a motto on the calibration target follows a tradition first established on the Mars Exploration Rovers Spirit and Opportunity and their Pancam calibration targets (see “The MarsDial: A Sundial for the Red Planet” in the Jan./Feb. 2004 issue of The Planetary Report, pages 6-11; https://s3.amazonaws.com/planetary/assets/tpr/pdf/tpr-2004-v24n1_200424_191231.pdf) and continued on the Mars Science Laboratory Curiosity rover and its Mastcam calibration target, which is a reworked flight spare of the Pancam cal target. The original inspiration for the Pancam motto was the presence of the shadow post on the target, which makes it resemble the gnomon of a sundial. Sundials traditionally are inscribed with a motto, often something associated with beginnings, endings, or the passage of time. The Spirit and Opportunity Pancam targets carried the motto “Two Worlds, One Sun” The Curiosity Mastcam target carries the motto: “To Mars To Explore”.
The Perseverance Mastcam-Z cal target, which also has a shadow post, and thus also acts as a sundial, carries the motto “Two Worlds, One Beginning”. This motto deliberately echoes the “Two Worlds, One Sun” of the Spirit and Opportunity Pancam cal targets and also evokes the idea of Earth and Mars growing out of the same protostellar cloud of gas and dust, having somewhat similar starting conditions, but since evolving along very different paths.
The motto is engraved on the top surface of the cal target using the font Eurostile. This typeface provides clean forms free of sharp points or fine, complex serifs or details. It is also a nod to science fiction buffs like many of us on the team, because Eurostile is extensively used in sci-fi movies, from 2001: A Space Odyssey to Star Trek.
Graphics
Figure 1a shows the calibration target top surface with its engraved motto and graphics. The graphics consist of a set of seven small icons or “vignettes” together with a circular “compass rose” or pointing diagram.
The seven small vignettes depict the development of life on Earth, culminating in humans and space flight. Beginning bottom left and reading clockwise, they show Earth and Mars orbiting the Sun steadily since the birth of the Solar System. Our depiction of life on Earth transitions from its first beginnings as microorganisms, to plants, animals, and humans. Today, we send rockets carrying robots, and perhaps one day soon humans, from Earth to Mars.

In more detail, the seven vignettes are:
- Mercury, Venus, Earth and Mars orbiting the Sun, symbolizing the formation of the Solar System and the steady revolutions of the planets in their orbits throughout the history of the Solar System. The orbital positions for Mercury, Venus, and Earth are depicted for the launch window in July 2020, and the position of Mars is based on its approximate position at the time of landing in February 2021.
- A DNA strand, symbolizing the first emergence of the genetic code and of life on Earth. Perhaps life formed with similar genetic coding on Mars around the same time?
- Cyanobacteria, symbolizing the early proliferation of microorganisms on our planet. This could also symbolize the possibility that microorganisms existed on early Mars.
- A fern, symbolizing green plants spreading across the Earth’s landmasses.
- A dinosaur (Apatosaurus), symbolizing animals and the great diversity of life on Earth. The original version of this vignette was more stylized but we changed it into a more realistic-looking Apatosaurus.
- Humans. This vignette deliberately echoes the image of humans on the Pioneer plaques and reproduced in the Voyager Golden Records. On the Pioneer plaque, however, only the man is waving. The wave was meant to demonstrate the motion of the human arm, but the choice of the man as the person to wave and thus “greet” anyone encountering the probe was criticized by some at the time. On Voyager, the Golden Records include an encoded version of this image (as part of image #52) in which the woman is waving instead of the man. Our version has both the man and woman waving. Since the Perseverance rover is going to Mars, not into interstellar space, we were less concerned with communicating a flawed understanding of human arm motion to future viewers of the target, and opted instead to project friendly greetings from both people.
- A rocket, symbolizing space flight, rovers flying to Mars, and potential future sample return and astronauts traveling to Mars in the future. Here, we moved in the opposite direction from the dinosaur in vignette 5, going from a more realistic original draft to a more stylized final version. We felt that an earlier version, with a realistic depiction of the Atlas V rocket that launched Perseverance, could be visually interpreted by some people as a missile (that is, a weapon). The stylized rocket takes inspiration from classic science fiction that was popular at the dawn of the Space Age, which in turn has inspired many to pursue and enable the exploration of other worlds, including Mars.
The original organization of the four circular color patches followed the rainbow, but this was changed in order to make the rocket be placed between the blue and the red patches, thus appearing to travel from blue Earth to red Mars.
The compass rose around the inner rings serves as a pointing diagram because its cardinal points are aligned with the X-Y axes of the rover coordinate system, so that one may easily read the direction of the shadow post’s shadow in rover coordinates, thus finding the direction to the Sun in the same coordinate system (the compass point just above the motto points to the front of the rover). This capability could simplify EPO activities designed to use the calibration target as a sundial and, for example, deduce the local time of sol if the rover’s heading is known in the local planetary coordinate system (north, south, east, west). Alternatively, given knowledge of the local time of sol, the rover’s heading could also be deduced.
Inspirational Message
Both the Spirit and Opportunity Pancam and the Curiosity Mastcam calibration targets carry “secret messages” printed around the edges of the target and not visible (or resolvable) to the cameras.
On the Pancam target the message is:
“People launched this spacecraft from Earth in our year 2003. It arrived on Mars in 2004. We built its instruments to study the martian environment and to look for signs of water and life. We used this post and these patterns to adjust our cameras and as a sundial to reckon the passage of time. The drawings and words represent the people of Earth. We sent this craft in peace to learn about Mars’ past and about our future. To those who visit here, we wish a safe journey and the joy of discovery.”
For the Mastcam target the message is:
“For millennia, Mars has stimulated our imaginations. First we saw Mars as a wandering red star, a bringer of war from the abode of the gods. In recent centuries, the planet’s changing appearance in telescopes caused us to think that Mars had a climate like the Earth’s. Our first space age views revealed only a cratered, Moon-like world, but later missions showed that Mars once had abundant liquid water. Through it all, we have wondered: Has there been life on Mars? To those taking the next steps to find out, we wish a safe journey and the joy of discovery.”
Because of efforts to minimize the mass of the target’s base, the space available along the edge of the Perseverance Mastcam-Z cal target is more limited. Thus, the message is briefer:
Are we alone? We came here to look for signs of life, and to collect samples of Mars for study on Earth. To those who follow, we wish a safe journey and the joy of discovery.
The phrase “joy of discovery” then repeats in the remaining space in Mandarin, Hindi, Spanish, and Arabic. Together with English, these are the five most spoken languages on Earth. “Joy of discovery”, of course, echoes the final phrase on both the Pancam and the Mastcam calibration targets, and connects Perseverance’s journey in an inspirational way to those of its rover predecessors. Figure 4 shows images of the edge of the flight Mastcam-Z calibration target from four directions, making the entire inspirational message visible.

Figure 4: The “inspirational message” laser-engraved on the edges of the primary Mastcam-Z radiometric calibration target. Photo credit: Niels Bohr Institute, Copenhagen, Denmark/NASA/JPL-Caltech/ASU.
Manufacture and Testing
Although these calibration targets are relatively simple things as space instruments go – small, with no moving parts or electronic components – nothing is ever entirely simple when it comes to space flight. The targets underwent a comprehensive program of thermal, vacuum, vibration, and shock tests to ensure that they would survive launch, landing on Mars, and the expected large daytime through nighttime temperature swings through the required number of sols (with margin) on the Martian surface. A number of challenges were encountered in the process of manufacture and testing. A total of twenty gold-plated bases were fabricated, and of these, eight were fully assembled and several more were partially assembled. In addition to the flight unit, flight spares, test units, and display units were also fabricated.
Early in the assembly process, the eight small ceramic patches around the periphery of the primary target proved to be vulnerable to developing cracks in their thin edges. This made the manual assembly process always somewhat nerve-wracking until – after significant practice and experience – all eight patches were in place and fully bonded to the underlying epoxy. Once the epoxy hardened the structure is resilient, however, which was demonstrated by vibration and shock tests. Early test units failed thermal testing as cracks developed in the central grayscale rings, due to strain associated with the different thermal expansion between the aluminum base and the ceramic rings. This was solved by a slight redesign of the base, a change to a less stiff epoxy, and a change to the procedure for epoxy application.
Probably the single most frustrating part of the cal target development was the laser-engraving process. During engraving the laser burns through the thin layer of gold and oxidizes the underlying silver to create a black color. Too little power or time and the silver does not turn black. Too much, and the laser burns through the silver into the aluminum underneath. The engraving machine has many settings: number of pulses per point, power delivered in each pulse, focus, etc. It took much trial and error to get the settings correct on the machine. Just as we got it figured out the machine broke irrevocably and had to be replaced by a new machine, of an entirely different model, and the process had to start over. Eventually, the later bases were produced with a thicker silver layer to reduce risk of burning through the silver during engraving. This, then, led to worries much later in the process because the early test units had had a different thickness of silver from the later test units and from the flight unit. But it all worked out fine.
Characterization of Colors and Grayscales
Before using the calibration targets on Mars, we need to know very precisely how each of the eight color and grayscale materials reflect light. We need to know the reflectance spectra of the materials (how much sunlight they reflect as a function of wavelength), but we also need to know how the reflectance changes as the angle of sunlight changes over the course of each sol. Thus, an extensive characterization program was conducted at several facilities. The reflectance of the eight materials was measured by team members and other colleagues at the University of Copenhagen in Denmark, at Western Washington University in Bellingham, at the University of Winnipeg in Canada, at the California Institute of Technology (Caltech) in Pasadena, and at the University of Bern in Switzerland. At the University of Winnipeg, the effect of intense Mars-like ultraviolet (UV) light on the colors of the eight materials was studied, confirming that the materials will only change very little with UV-exposure through a long mission at the Martian surface. At Caltech and at the University of Bern the variation of reflectance with geometry was extensively characterized in tens of thousands of individual measurements. From this collaborative data set we have built a software model that will tell us, for any orientation of the rover and the Sun and for any Mastcam-Z filter, the expected reflectance of the eight color and grayscale materials. The calibration targets were also repeatedly imaged through all the filters of the flight Mastcam-Z system both before and after mounting on the rover, to confirm that the camera correctly reproduces the laboratory-acquired reflectances.
Operations on Mars
When Mastcam-Z first opens its eyes on Mars, among of the first things we will see are the primary and secondary calibration targets. We need to image the targets as early as possible in the mission, while they are still relatively dust-free, in order to establish a clean baseline for later monitoring of dust deposition and in order to confirm that the camera system indeed reproduces the known colors and grayscales. Later, as the rover starts exploring and daily operations get underway, imaging the calibration targets will become a routine activity, accompanying many of the camera observations of Martian rocks and soils. A dedicated subset of the Mastcam-Z team will monitor performance of the cameras, will track accumulation of dust on the calibration targets, and will carefully analyze the observed reflectance properties of multispectral image targets, to make sure that we continue to get the colors of Mars exactly right. As the rover team guides Perseverance within Jezero crater (and perhaps beyond), studies ancient lake deposits, and decides where to acquire and cache the rover’s precious load of samples, accurately calibrated Mastcam-Z images will help guide the team’s decisions. The cal targets will also help us share gorgeous natural color and false color images and panoramas of Jezero with the general public, via the team’s web site at https://mastcamz.asu.edu.
A Team Effort
Just like any spaceflight instrument project, this work designing, building, and testing the Mastcam-Z calibration targets – including the concepts and implementation of the embellishments – has benefitted substantially from many individuals and organizations beyond just the main authors of this article. Specifically, we would like to recognize and thank the contributions from Jake Adler, Lukas Affolter, Dan Applin, Zach Bailey, Pierre Beck, Aaron Bello-Arufe, Michael Heide Bernt, Bruce Betts, Jennifer Buz, Mike Caplinger, Ernest Cisneros, Ed Cloutis, Paul Corlies, Mikkel Knudsen Edslev, Bethany Ehlmann, René Stennow Gotfredsen, Craig Hardgrove, Alex Hayes, Thomas Hedegaard, Ken Herkenhoff, Briony Horgan, Elsa Jensen, Ole Busborg Jensen, Jeff Johnson, Tex Kubacki, Gulliermo Lopez-Reyes, Justin Maki, José Antonio Manrique, Eva Mateo-Marti, Marco Merusi, Karl-Emil Nielsen, Kristen Paris, Antoine Pommerol, Melissa Rice, Anton Norup Sørensen, Rob Sullivan, Christian Tate, Nick Thomas, Danika Wellington, Andrew Winhold, Dennis Wistisen, and Mike Wolff. Last, but not least, we wish to gratefully acknowledge support from NASA’s Mars 2020 Project, JPL–Caltech, and the Carlsberg Foundation, without which the manufacture, tests and delivery of the calibration targets would not have been possible.
Additional Information and Background
3-D print your own copies of the Mastcam-Z calibration targets, using the instructions and files provided in Sarah Al-Ahmed’s blog entry!
“Calibrating Mars” by Kjartan Kinch, Mark Hilverda, Morten Bo Madsen, and Jim Bell, in The Planetary Report, https://www.planetary.org/articles/calibrating-mars, pages 19-22, December, 2020.
“5 Hidden Gems Are Riding Aboard NASA’s Perseverance Rover,” NASA/JPL Press Release, https://www.jpl.nasa.gov/news/news.php?feature=7796, December 8, 2020.
“Danes are Sending Drawings and Secret Messages to Mars!”, “Science.dk” online magazine story by Lise Brix (in Danish), https://videnskab.dk/kultur-samfund/danskere-har-faaet-tegninger-og-hemmelig-besked-med-til-mars, Dec. 9, 2020.
“Radiometric Calibration Targets for the Mastcam-Z Camera on the Mars 2020 Rover Mission,” Kinch, K.M., M.B. Madsen, J.F. Bell III, J.N. Maki, Z. Bailey, A.G. Hayes, O.B. Jensen, M. Merusi, M.H. Bernth, A.N. Sørensen, M. Hilverda, E. Cloutis, D. Applin, E. Mateo-Marti, J. A. Manrique, G. Lopez-Reyes, A. Bello-Arufe, B. Ehlmann, J. Buz, A. Pommerol, N. Thomas, L. Affolter, K. Herkenhoff, J.R. Johnson, M. Rice, P. Corlies, C. Tate, M. Caplinger, E. Jensen, T. Kubacki, E. Cisneros, K. Paris,A. Winhold, and D. Wellington, Space Sci. Rev., https://doi.org/10.1007/s11214-020-00774-8, 2020.
“The Mars 2020 Rover Mast Camera Zoom (Mastcam-Z) Multispectral, Stereoscopic Imaging Investigation,” Bell III, J.F., J.N. Maki, G.L. Mehall, M.A. Ravine, M.A. Caplinger, Z.J. Bailey, S. Brylow, J.A. Schaffner, K.M. Kinch, M.B. Madsen, A. Winhold, A. Hayes, P. Corlies, M. Barrington, R. Deen, E. Cisneros, E. Jensen, K. Paris, K. Crawford, C. Rojas, L. Mehall, J. Joseph, J.B. Proton, N. Cluff, B. Betts, E. Cloutis, A. Coates, A. Colaprete, K.S. Edgett, B.L. Ehlmann, S. Fagents, J. Grotzinger, C. Tate, C. Hardgrove, K. Herkenhoff, B. Horgan, R. Jaumann, J.R. Johnson, M. Lemmon, G. Paar, M. Caballo-Perucha, S. Gupta, C. Traxler, F. Preusker, M. Rice, M.S. Robinson, N. Schmitz, R. Sullivan, and M.J. Wolff, Space Science Reviews, https://link.springer.com/article/10.1007/s11214-020-00755-x, 2020.
“The MarsDial: A Sundial for the Red Planet” by Jim Bell and Woody Sullivan, in the Jan./Feb. 2004 issue of The Planetary Report, pages 6-11; https://s3.amazonaws.com/planetary/assets/tpr/pdf/tpr-2004-v24n1_200424_191231.pdf
About the Authors
KJARTAN KINCH is a Mastcam-Z coinvestigator based at the Niels Bohr Institute of the University of Copenhagen in Copenhagen, Denmark. He led the design, manufacture, and testing of the Mastcam-Z calibration targets. He loves maps.
MARK HILVERDA is a digital specialist for The Planetary Society. He is a designer and geoscientist who loves space, art, and web development. Working with the Mastcam-Z team, he created the art for the vignettes on the calibration target.
MORTEN BO MADSEN is a Mastcam-Z coinvestigator based at the Niels Bohr Institute of the University of Copenhagen in Copenhagen, Denmark. He has participated in all of NASA’s rover missions and led the design, manufacture, and testing of camera calibration targets for NASA’s Phoenix lander. He loves music, Mars landscapes and working with science.
JIM BELL is the Mastcam-Z principal investigator, and he served as president of The Planetary Society’s board of directors from 2008 to 2020. He teaches at Arizona State University and has been having fun using and designing Mars calibration targets since NASA’s 1997 Pathfinder mission.